上海交大IRMV“月极巡拓者”团队勇夺“揭榜挂帅”最高奖
在2025年度中国第十九届“挑战杯”揭榜挂帅擂台赛中,上海交大IRMV“月极巡拓者”团队一举斩获大赛特等奖第一名擂主的桂冠。获奖团队由上海交通大学自动化与感知学院智能机器人与机器视觉团队(IRMV)王贺升教授指导,吴新锐同学担任队长, 队员为徐剑波、马子奇、秦阳、罗康、陈昕、杨凯歌、陈南汐、肖杨奕同学。团队凭借卓越的技术方案和出色的现场表现,从众多参赛队伍中脱颖而出,充分展现了团队在智能机器人、自主导航与控制等前沿科技领域的深厚积累与创新能力。

项目概述
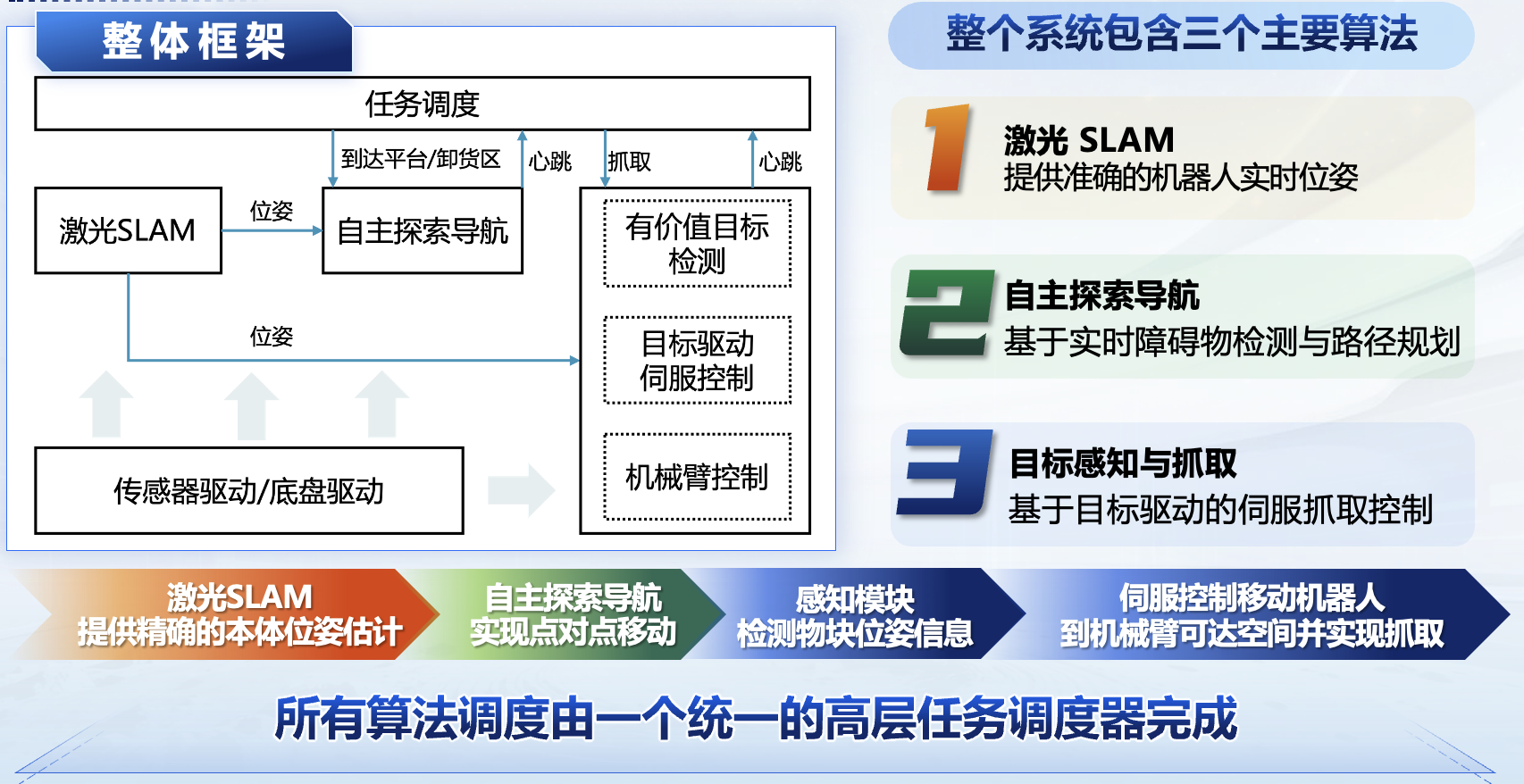
本次大赛由中国航天科技集团有限公司五院五〇二所发起,赛事背景设定于月球极区(纬度80°以上)这一国际深空探测前沿热点区域。比赛要求参赛机器人在地表未知、光照条件极端(低光照、长阴影)、障碍物遍布的模拟月面环境中,完全自主地完成从启动、导航、目标识别抓取、物料搬运到精准卸货并返回起点的全流程任务,是对机器人环境感知、自主决策、精确控制等能力的极致考验。面对重重困难和挑战,“月极巡拓者”团队提出了一套集高性能激光SLAM(同步定位与建图)、实感自主探索导航与视觉伺服协同抓取于一体的创新性解决方案。
技术创新点
本方案的创新之处主要体现在以下几个方面:
- 硬件设计:
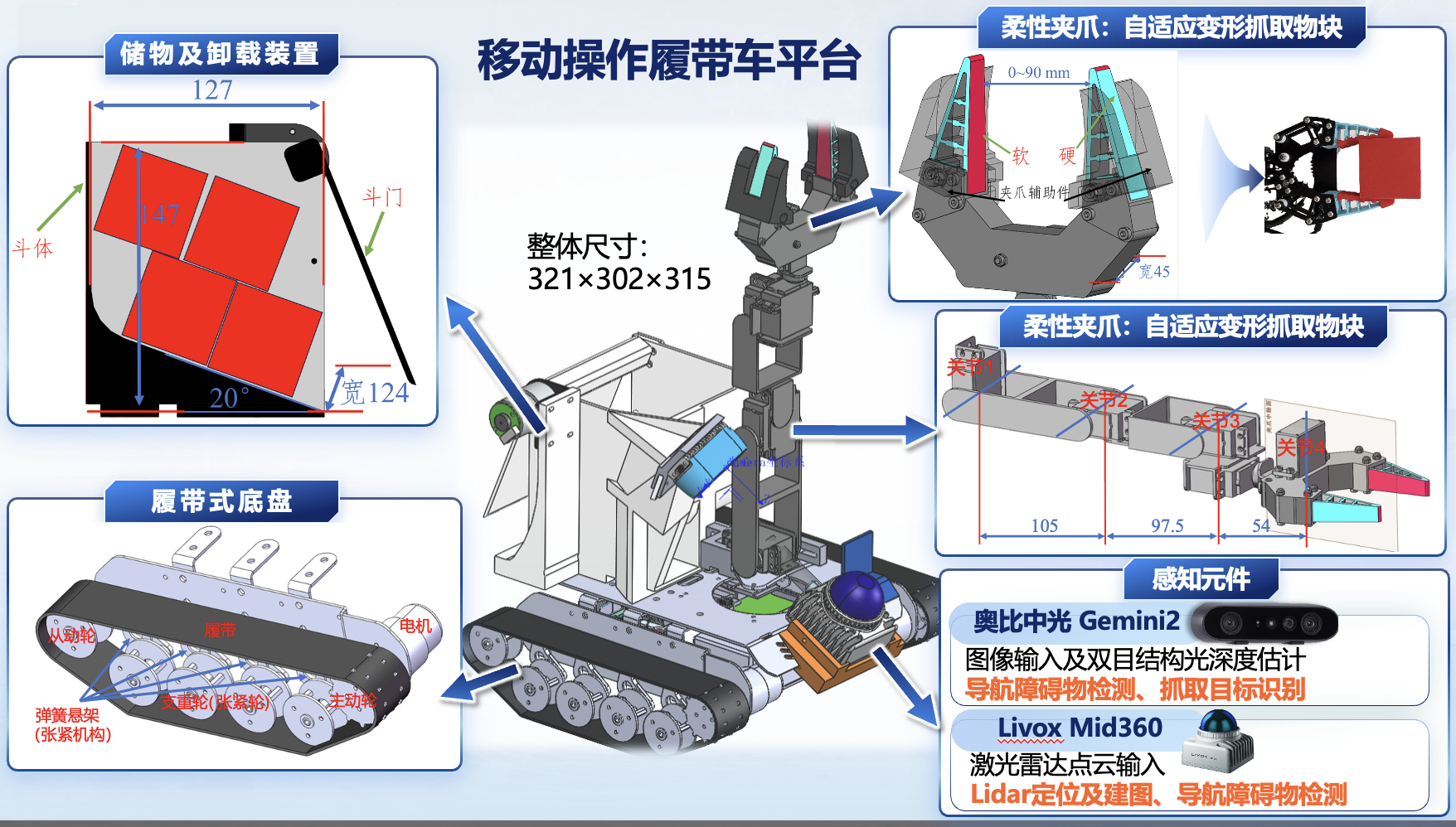
创新性地采用履带式底盘以适应月面松软地形,搭载四自由度机械臂与自适应柔性夹爪,并集成Livox Mid360激光雷达、奥比中光Gemini2深度相机等先进传感器,在有限的体积和重量约束下,实现了感知、决策、执行的完美协同。
- 鲁棒SLAM与自主避障导航:
团队采用了激光雷达-IMU紧耦合的SLAM算法,通过融合退化检测、因子图优化等先进机制,有效抑制了在稀疏、复杂月面地貌下的定位漂移,实现了全局一致的高精度建图与实时定位,为自主导航奠定了坚实基础。在智能导航,未知环境自主穿行:基于实时感知的障碍物信息,团队应用了自主动态探索算法进行动态路径规划与增量式地图更新,使机器人能够在完全未知的环境中自主探索,有效规避陨石坑、岩石等动态或静态障碍,可靠地往返于各任务点之间
- 精准抓取,眼手协同稳准操作:
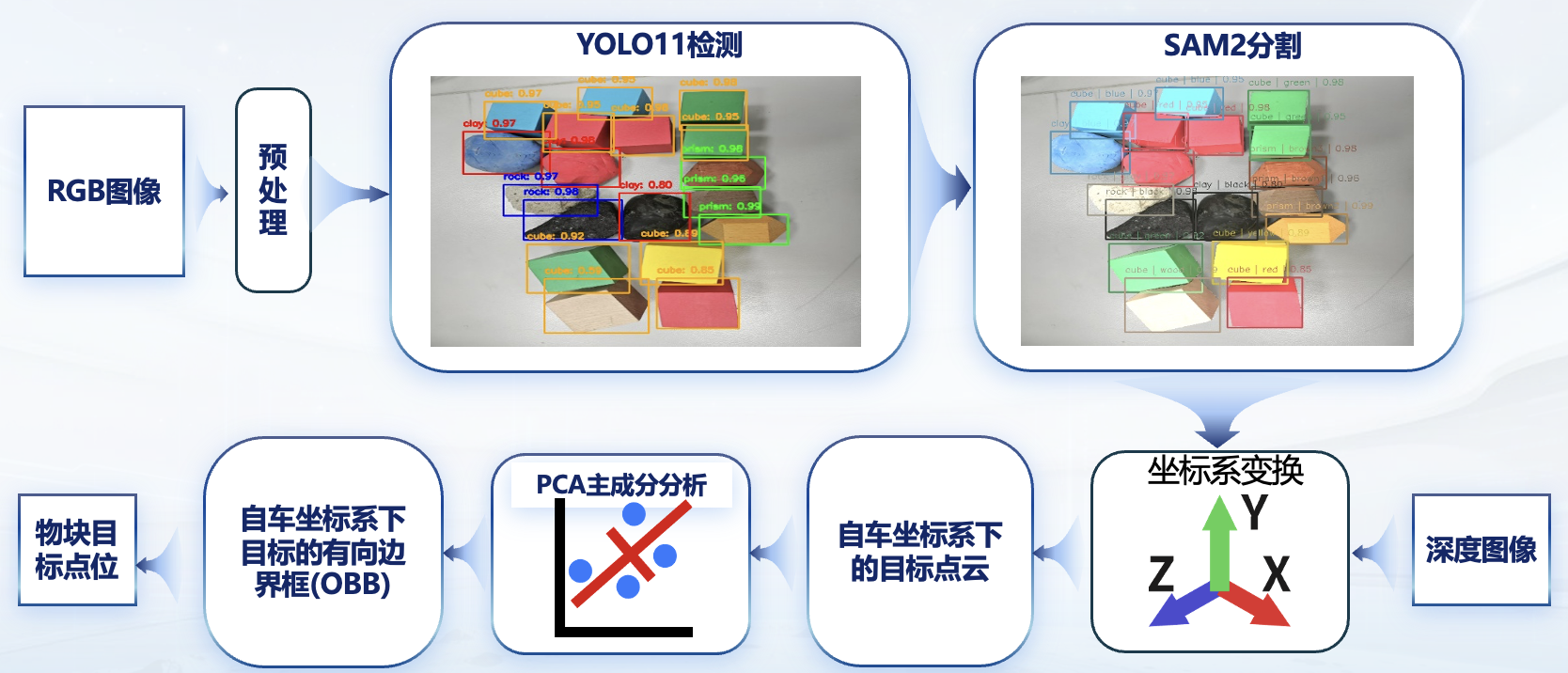
在目标抓取环节,团队创新性地采用了“YOLO11目标检测 + SAM2语义分割 + 主成分分析(PCA)”的技术路线,实现了对特定颜色、形状物料的高精度识别与三维定位。结合“角度PID粗控 + 平移PID精控 + 角度PID精控”的三级伺服控制系统,确保了机械臂在移动基座上也能完成高成功率、高精度的抓取与放置操作。
优越性能
在严苛的仿真与实机测试中,该方案表现出了极高的可靠性和鲁棒性。机器人成功实现了从起点到取货点、自动拾取目标、运输至卸货点、精准卸货并返回起点的完整闭环任务。尤其在低光照条件下,其目标感知与抓取成功率依然保持在极高水准,充分验证了系统应对极端工况的能力。
未来展望
此次夺冠是对团队多年来在机器人技术领域深耕不辍的最佳肯定。未来,团队将继续优化算法性能,探索语义导航、端到端学习抓取等前沿方向。该技术方案不仅适用于地外探测机器人,在矿山巡检、应急救援、智能仓储等地面复杂场景的自主移动机器人领域也具有广阔的应用前景,深刻诠释了“以空间技术带动地面应用”的创新理念。上海交通大学IRMV“月极巡拓者”团队的这次成功,不仅是学术科研与实践应用的精彩结合,更是中国青年学子勇于挑战科技前沿、服务国家重大战略需求的生动体现,为我国未来深空探测与智能机器人技术的发展注入了新的活力。