Shanghai Jiao Tong University IRMV “Lunar Pioneers” Team Wins the Top Prize of “Champion on the Challenge List”
In the 19th China “Challenge Cup” Champion-on-the-List Competition 2025, the Shanghai Jiao Tong University IRMV “Lunar Pioneers” team won the Special First Prize, taking the championship of the contest. The award-winning team was guided by Professor He-Sheng Wang from the Intelligent Robotics and Machine Vision (IRMV) team at the School of Automation and Perception, Shanghai Jiao Tong University. The team leader was Xinrui Wu, and the members included Jianbo Xu, Ziqi Ma, Yang Qin, Kang Luo, Xin Chen, Kaige Yang, Nanxi Chen, and Yangyi Xiao. With an outstanding technical solution and excellent on-site performance, the team stood out among numerous competing teams, demonstrating their solid expertise and innovative capabilities in cutting-edge fields such as intelligent robotics, autonomous navigation, and control.

Project Overview
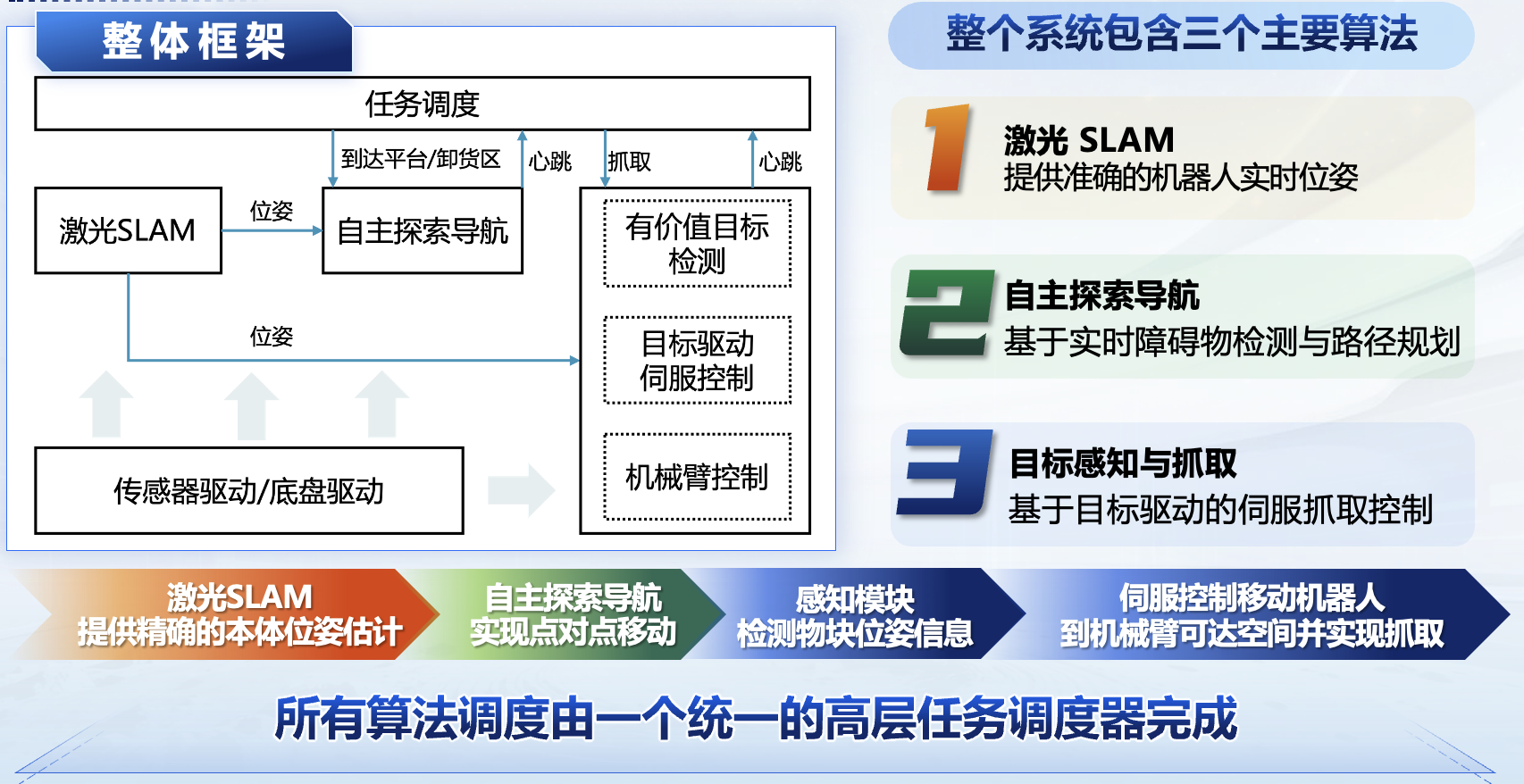
This competition was initiated by the Fifth Academy, No.502 Institute of China Aerospace Science and Technology Corporation. The scenario is set in the lunar polar region (latitude above 80°), a hotspot for international deep space exploration. The competition requires participating robots to autonomously complete a full task sequence in a simulated lunar surface environment with unknown terrain, extreme lighting conditions (low illumination, long shadows), and abundant obstacles. The task includes startup, navigation, target recognition and grasping, material transport, precise unloading, and return to the starting point, fully testing the robot’s environmental perception, autonomous decision-making, and precise control capabilities. Facing numerous difficulties and challenges, the “Lunar Pioneers” team proposed an innovative solution integrating high-performance LiDAR SLAM (Simultaneous Localization and Mapping), immersive autonomous exploration navigation, and vision-guided cooperative grasping.
Technical Innovations
The innovations of this solution are mainly reflected in the following aspects:
-
Hardware Design:
The team innovatively adopted a tracked chassis to adapt to soft lunar terrain, equipped with a four-degree-of-freedom robotic arm and an adaptive flexible gripper, and integrated advanced sensors including Livox Mid360 LiDAR and Orbbec Gemini2 depth camera. Within strict volume and weight constraints, the system achieves seamless coordination between perception, decision-making, and execution.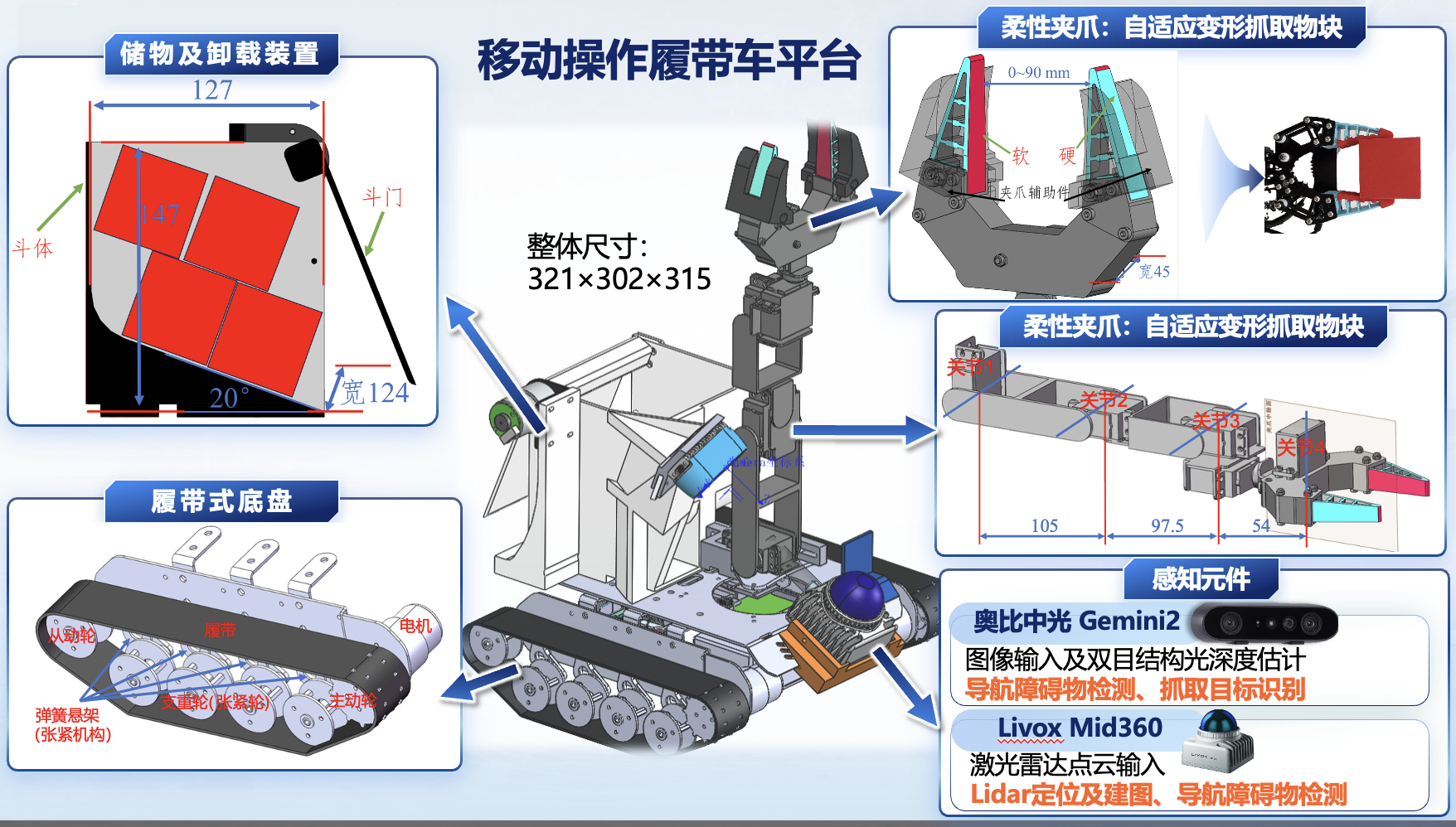
-
Robust SLAM and Autonomous Navigation:
The team adopted a LiDAR-IMU tightly coupled SLAM algorithm, incorporating degeneration detection and factor graph optimization to effectively suppress localization drift under sparse and complex lunar terrain, achieving globally consistent high-precision mapping and real-time positioning, providing a solid foundation for autonomous navigation. Based on real-time obstacle perception, the team applied a dynamic exploration algorithm for path planning and incremental map updates, allowing the robot to autonomously explore completely unknown environments, reliably avoiding craters, rocks, and other dynamic or static obstacles while traveling between task points. -
Precise Grasping with Eye-Hand Coordination:
During target grasping, the team innovatively employed the “YOLO11 object detection + SAM2 semantic segmentation + Principal Component Analysis (PCA)” pipeline to achieve high-precision recognition and 3D positioning of objects with specific colors and shapes. Combined with a three-level servo control system (“angle PID coarse control + translation PID fine control + angle PID fine control”), the robotic arm can achieve high success rate and accuracy even when mounted on a mobile base.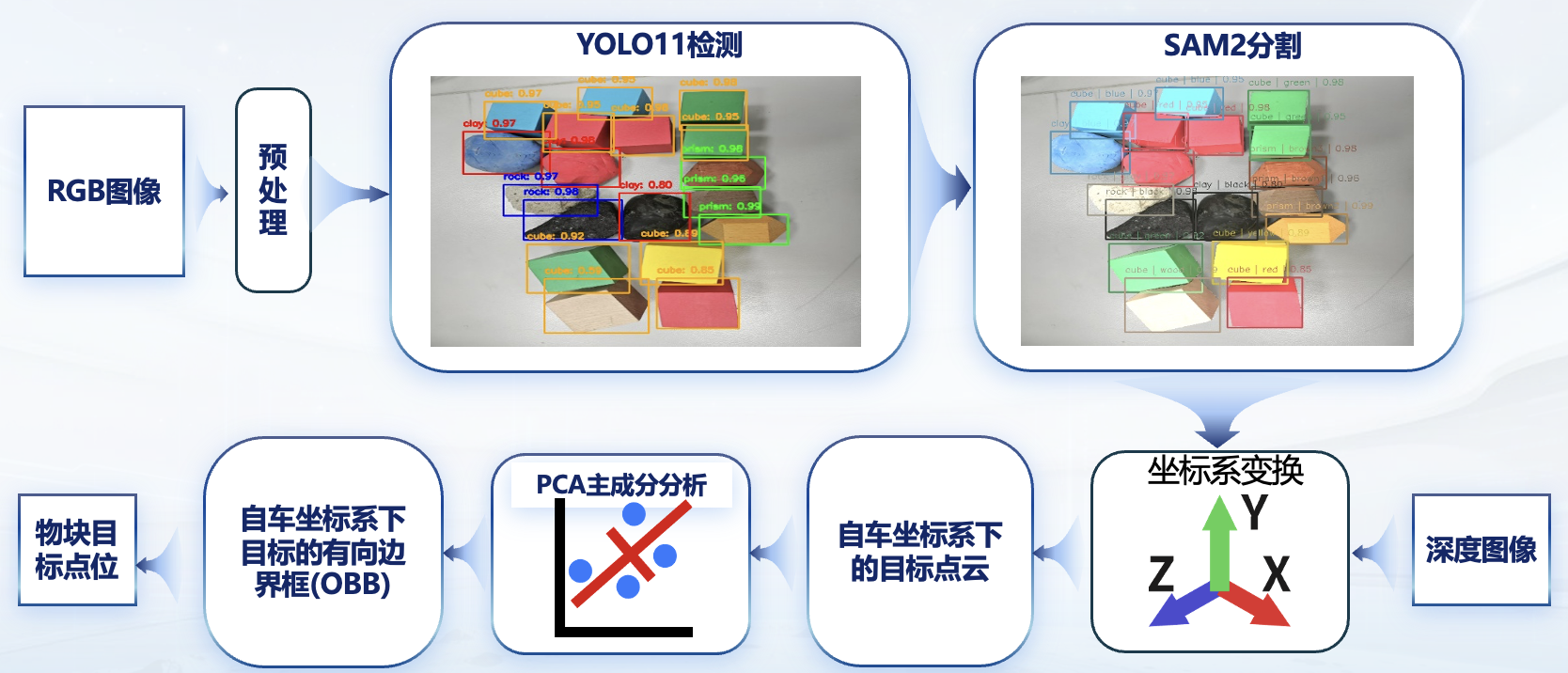
Outstanding Performance
In rigorous simulation and real-world tests, the solution demonstrated extremely high reliability and robustness. The robot successfully completed the full closed-loop task from the starting point to the pickup point, automatically picking up targets, transporting them to the drop-off point, unloading accurately, and returning to the start. Especially under low-light conditions, the success rate of target perception and grasping remained high, fully validating the system’s capability to operate under extreme conditions.
Future Outlook
This championship is the best recognition of the team’s years of dedication in the field of robotics. In the future, the team will continue to optimize algorithm performance and explore cutting-edge directions such as semantic navigation and end-to-end learning for grasping. This technical solution is not only applicable to extraterrestrial exploration robots but also has broad application prospects for autonomous mobile robots in complex terrestrial scenarios, such as mine inspection, emergency rescue, and intelligent warehousing, fully illustrating the innovative concept of “driving terrestrial applications through space technology.” The success of the Shanghai Jiao Tong University IRMV “Lunar Pioneers” team is not only a brilliant combination of academic research and practical application but also a vivid example of Chinese youth boldly challenging the frontiers of science and serving major national strategic needs, injecting new vitality into China’s future deep space exploration and intelligent robotics development.